
Digital Globe's WorldView-4 at Lockheed Martin Space Systems' Sunnyvale, California, facility. Credit: Lockheed Martin
Digital Globe's WorldView-4 at Lockheed Martin Space Systems' Sunnyvale, California, facility. Credit: Lockheed Martin
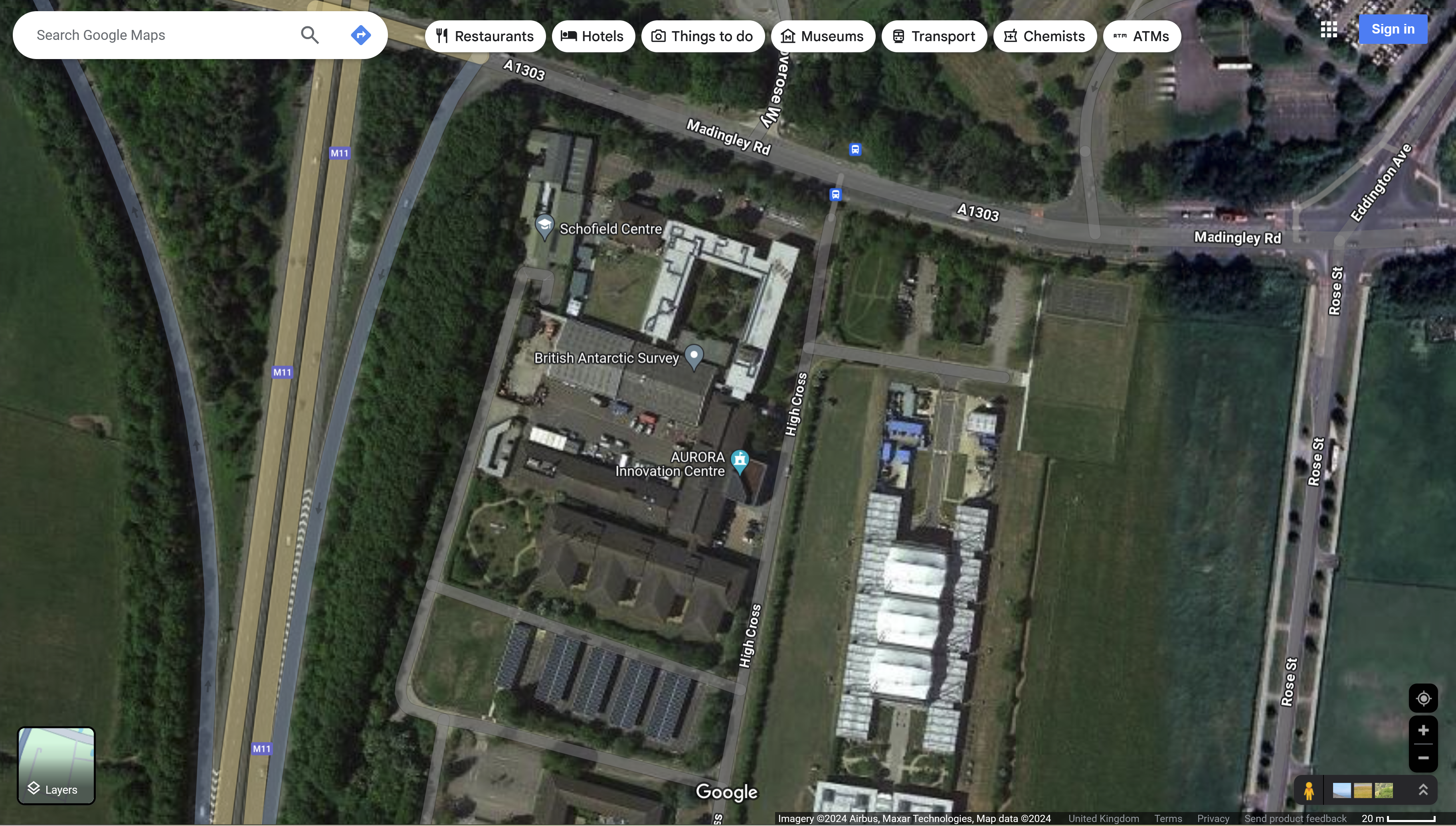
Satellite view of BAS, Cambridge site. Credit: Google Maps
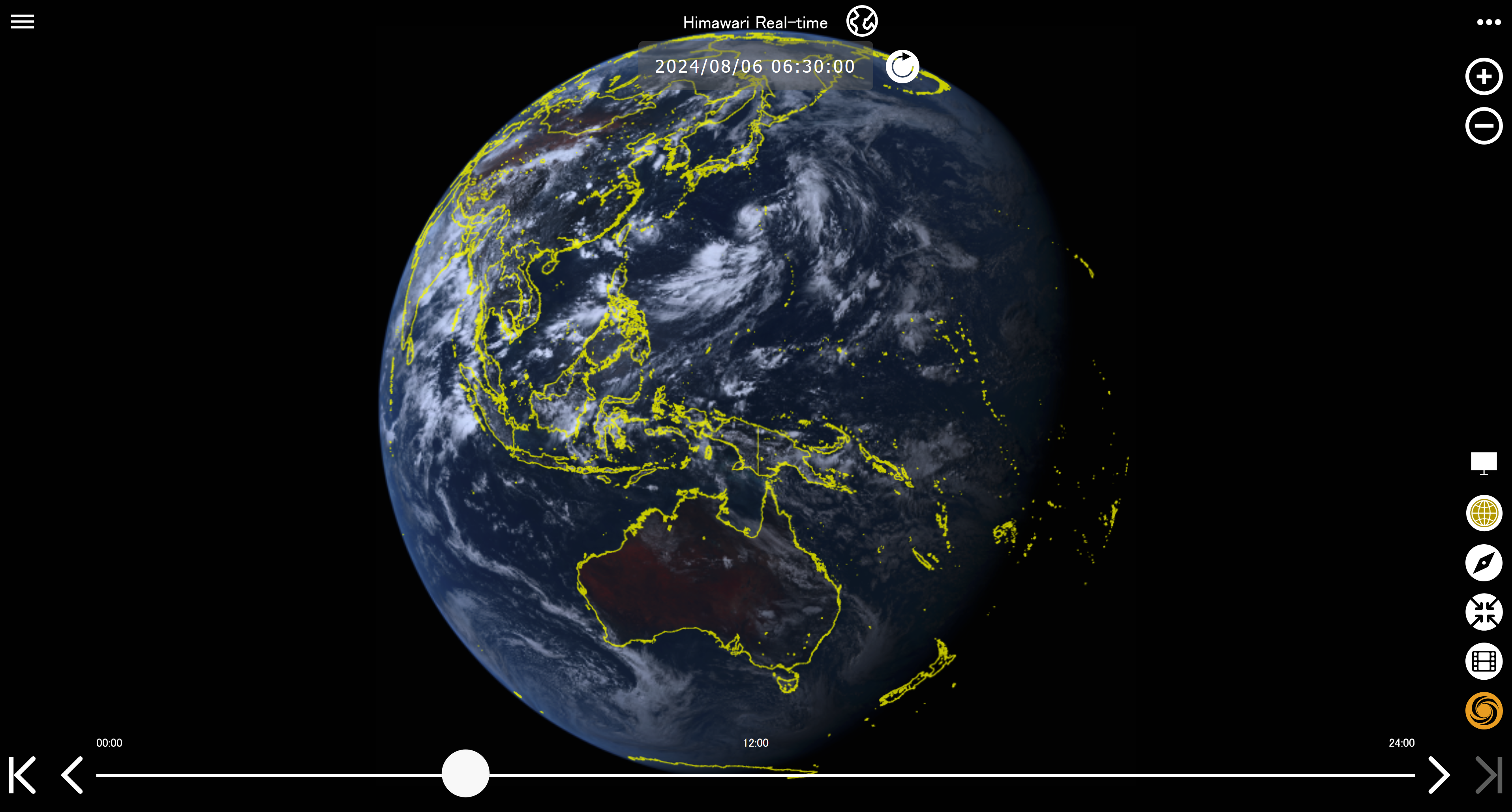
View from geostationary meteorological Himawari satellite. Credit: NICT, Japan

Spectral bands of Sentinel-2 and Landsat 7 & 8.
Spectral signatures of vegetation, soil, and water are depicted in green, red, and blue respectively.
Credit: DOI:10.13140/RG.2.2.20077.54245
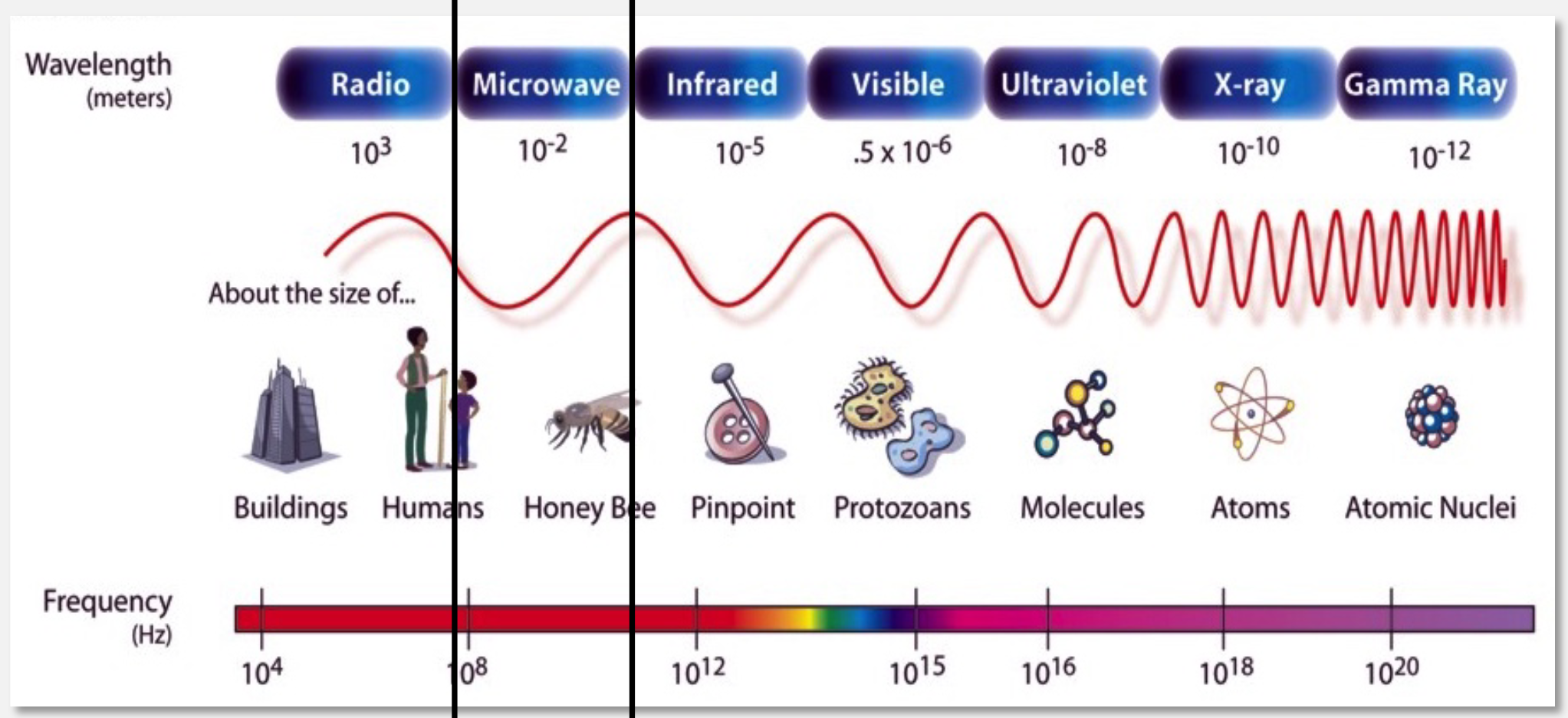
Electromagnetic spectrum
Credit: NASA ARSET

Credit: NASA EarthData
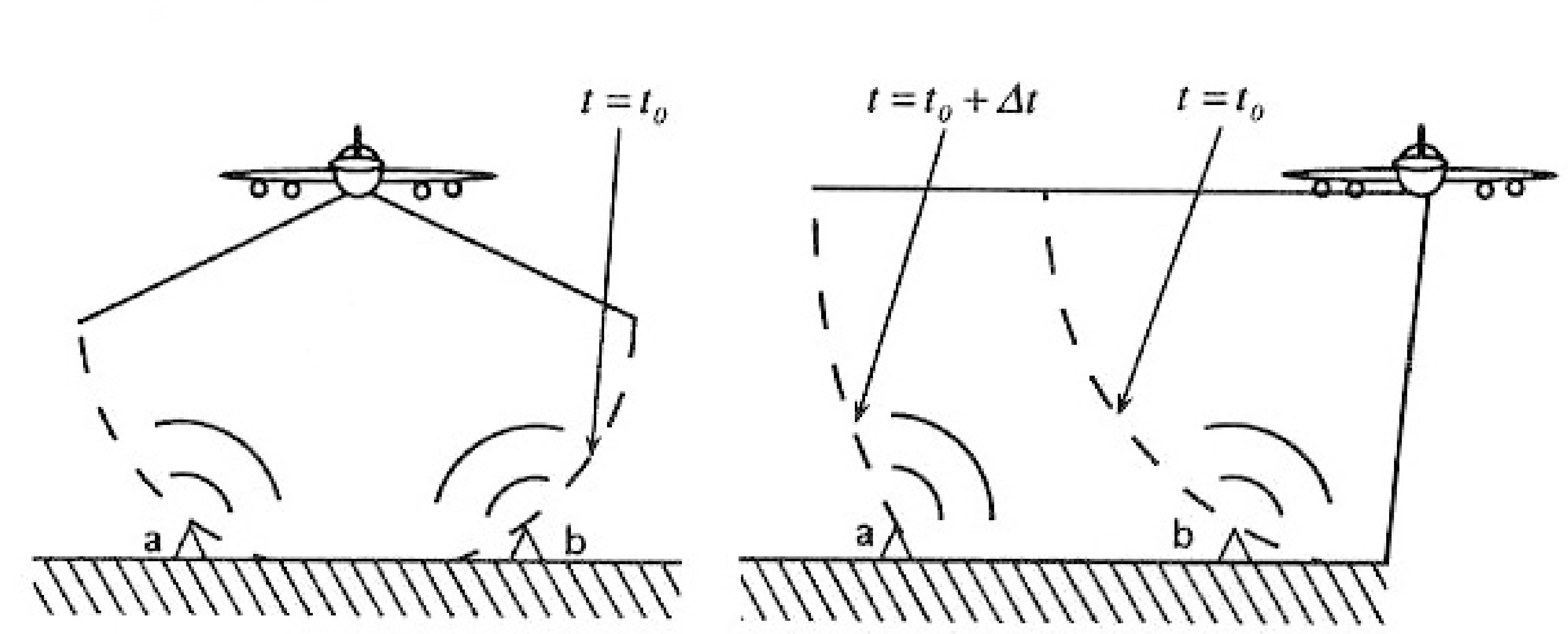
Down-Looking vs. Side-Looking Radar
Credit: NASA ARSET

SAR image, representing Foreshortening, Layover and Shadow effects
Optical image










